Plant Simulation 运动机构的三维仿真研究(转载)
文章转载自微信公众号:数字化视界,已获得转载许可。点击此处关注公众号
Plant Simulation 软件是西门子集团旗下的一款集建模、仿真、动画制作和优化为一体的离散事件仿真软件,常用于生产制造与物流行业。本文将以Plant Simulation 15 版本软件为背景介绍如何利用Plant Simulation对常见的运动机构进行简单的三维仿真操作。
运动机构的三维仿真
运动机构的三维仿真实质上是三维中运动对象的特定动画呈现,而Plant Simulation中的动画主要有四种类型:
(1)Self Animations:对象自身动画(通过Pose可实现同样动画效果)
(2)Robert Arm Animations(仅PickAndPlace 对象有此动画类型)
(3)Mu Animations(Frame对象无此动画类型)
(4)Camera Animations(仅Frame对象有此动画类型)
如何设置运动机构
1. 首先可以通过设置对象的Self Animations来得到想要的运动机构,具体步骤如下所述:
(1)打开对象的3D属性栏,找到Self Animation选项

(2)添加一个新的动画路径
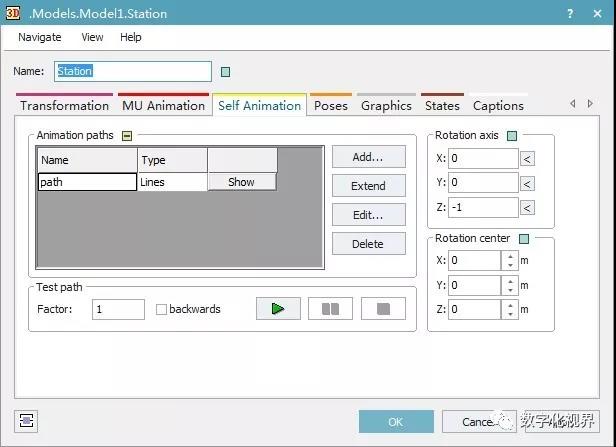
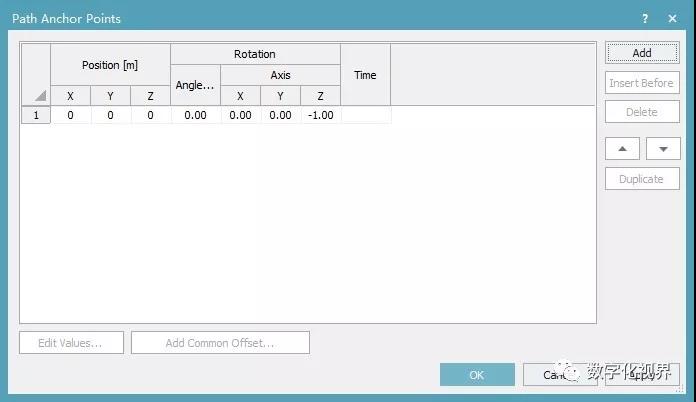
(3)点击Edit,编辑动画路径的锚点
(4)在对象的入口处设置使用添加的动画路径即可

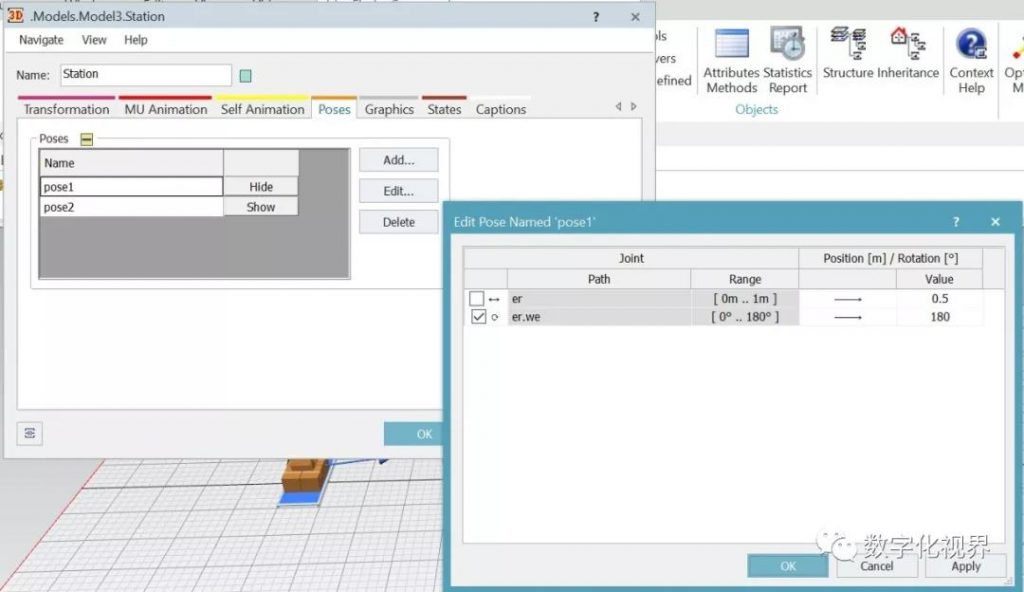
2.通过Joint与Pose的配合使用,同样可以实现运动机构的设置:
(1)设置对象的Pose首先需要设置其子可动画对象的Joint
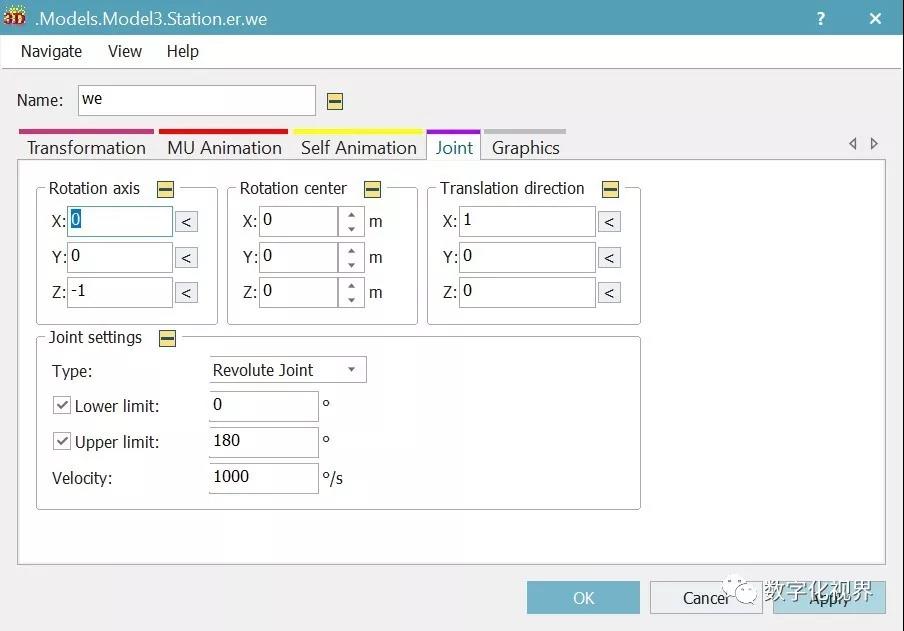
(2)为对象添加新Pose并编辑Pose
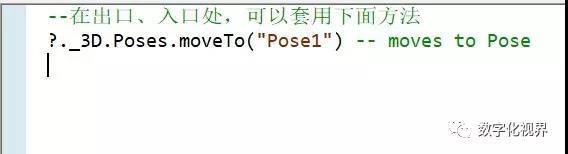
(3)在对象的出入口处使用代码控制
3.还可以通过全代码编写的方式实现运动机构的设置:
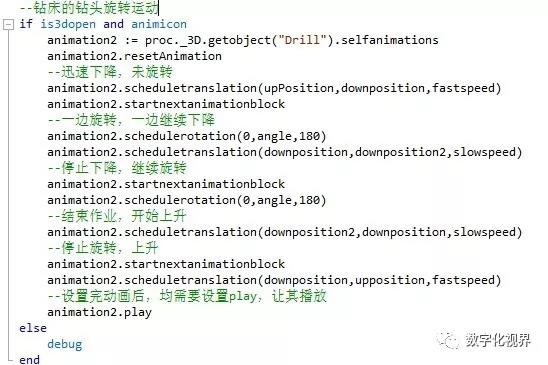
代码中完成运动机构设置的核心函数主要有:
(1)scheduletranslation:设置对象移动的动画,包含起始位置,目标位置,移动速度三个参数。
(2)startnextanimationblock:终止当前动画,开始下一动画。
(3)schedulerotation:设置对象旋转的动画,包含起始旋转角度,目标旋转角度,旋转速度三个参数。
Self Animations与Pose设置运动机构比较
Self Animations 与 Pose 均是对对象自身动画进行设置,并且在许多情况下均可实现相同的动画效果。因此,有必要对二者进行比较:
1.所有的可动画对象均可以设置Self Animations 而 Pose必须和Joint配合使用,且Pose设置的是对象的子对象的运动,并不能设置对象本身的运动。即如果对象没有子可动画对象,则不能用Pose。可以说,Self Animations的适用范围更广。
2.Self Animations的设置需要十分详细,起始坐标,目的地坐标,旋转角度,移动与旋转速度均需要设置,Pose在输入目标位置后会自动生成动画且对象一次只能使用一个Pose(如Pose无法实现一边移动一边旋转的功能)。前者灵活性更高,后者使用更加简便。
3.综合来说,由于两者不同的特性,Self Animations 更适合需要细致,小范围作业的运动机构使用,Pose则更加适合抓取,存放等运动机构使用。
注意事项
1. 要为对象设置运动机构,此对象必须为可动画对象,如不是则需要先将其设置为可动画对象。
2. 使用Pose设置对象运动机构时,对象必须有子可动画对象,并需要先设置子可动画对象的Joint,再设置Pose。
3. 对象一次只能显示一个Pose。
4. 大多数3D属性与方法如Position等均使用三维数组类型的值。
以上即是有关如何进行三维运动机构设置的一些常规设置方法,如有需要可由此链接下载示例模型:https://yunpan.360.cn/surl_yu8jzcdxASP(提取码:08da)
文章转载自微信公众号:数字化视界
